Acceleration of a RipStik and Falling Superballs
This summer the newly resurfaced walkway from the LRC to classroom A was calling my name. I used chalk to mark 0, 100, 200, 400, 600, and 800 centimeters. This worked well. The 100 cm and 200 cm were hit slow enough to react, but 300 came a tad too quickly. 400 centimeters was a good next guess. I started from a dead stop, mounting the board on the slight incline without pushing off. Thus I started at time 0 seconds, distance 0 centimeters.
Prior to going out I had covered some basic ideas in acceleration, but nothing mathematically definitional.

I had dropped marker from 100 cm and 300 cm and calculated that the speed was increasing.The note that acceleration is change in velocity divided by change in time was added after the RipStik session below.

I pumped up the speed by swizzling after 100 cm, always bearing in mind that there was no uphill runaway escape for this run. After 800 cm I coasted and then bailed. The walkway is just flat enough heading into office F2 (yes, that is its official name) to allow the board to lose some speed.

I took advantage of the gentle uphill to attempt something new - deceleration via coasting upslope. I built up a head of speed starting at F2 and headed for the LRC. The goal would have been to come to a rest at or just prior to zero, but that did not happen. I rocketed past 800 cm heading for 600 cm, covering that distance in 0.81 seconds. I had too much speed and just past 0 cm the slope reverses and I would not have stopped. Maybe the 800 cm run should be shifted slightly East so that an uphill overrun does not reach the small downhill into the LRC.
I failed to come to a rest on the uphill deceleration run, hence the last row is not zero velocity. Note too that on the last leg of my acceleration run my speed dropped, I had already backed off my acceleration

I began the lab session with the mathematical definition of acceleration (above) and then moved on to the details of the lab.



Elmihra drops while Mackleen holds the meter sticks.

Risenta drops the ball, Jane Rose holds the meters sticks, Rose Ann makes notes.

I then put up tables provided by Jane Rose, plotting both graphs as a demonstration of what the lab report required.

Although more confusing, the RipStik acceleration and deceleration went well. I think it might be fun to run the deceleration first, spin around and then accelerate down the sidewalk, creating a single continuous line. Might need someone to mark the zero, or maybe just reverse the whole thing, running a 1600 marked track from East to West. That way the deceleration heads up in distance, and then the acceleration falls back down. Might even get a pseudo-parabola with a bit of flatness at the turn-around.

Prior to going out I had covered some basic ideas in acceleration, but nothing mathematically definitional.

I had dropped marker from 100 cm and 300 cm and calculated that the speed was increasing.The note that acceleration is change in velocity divided by change in time was added after the RipStik session below.

I pumped up the speed by swizzling after 100 cm, always bearing in mind that there was no uphill runaway escape for this run. After 800 cm I coasted and then bailed. The walkway is just flat enough heading into office F2 (yes, that is its official name) to allow the board to lose some speed.

I took advantage of the gentle uphill to attempt something new - deceleration via coasting upslope. I built up a head of speed starting at F2 and headed for the LRC. The goal would have been to come to a rest at or just prior to zero, but that did not happen. I rocketed past 800 cm heading for 600 cm, covering that distance in 0.81 seconds. I had too much speed and just past 0 cm the slope reverses and I would not have stopped. Maybe the 800 cm run should be shifted slightly East so that an uphill overrun does not reach the small downhill into the LRC.
| time (s) | acc dist (cm) | deacc dist (cm) | acc velocity (cm/s) | deacc velocity (cm/s) | acceleration (cm/s²) | acceleration (cm/s²) |
| 0 | 0 | 0 | ||||
| 2.77 | 100 | 36 | 13 | |||
| 4.33 | 200 | 64 | 18 | |||
| 5.75 | 400 | 141 | 54 | |||
| 6.73 | 600 | 204 | 65 | |||
| 7.77 | 800 | 192 | -11 | |||
| 0.81 | 600 | |||||
| 1.69 | 400 | -227 | ||||
| 2.84 | 200 | -174 | -46 | |||
| 3.5 | 100 | -152 | -34 | |||
| 4.34 | 0 | -119 | -39 | |||
| 8.98 | -320 | -69 | -11 |
I failed to come to a rest on the uphill deceleration run, hence the last row is not zero velocity. Note too that on the last leg of my acceleration run my speed dropped, I had already backed off my acceleration

I began the lab session with the mathematical definition of acceleration (above) and then moved on to the details of the lab.



Elmihra drops while Mackleen holds the meter sticks.

Risenta drops the ball, Jane Rose holds the meters sticks, Rose Ann makes notes.
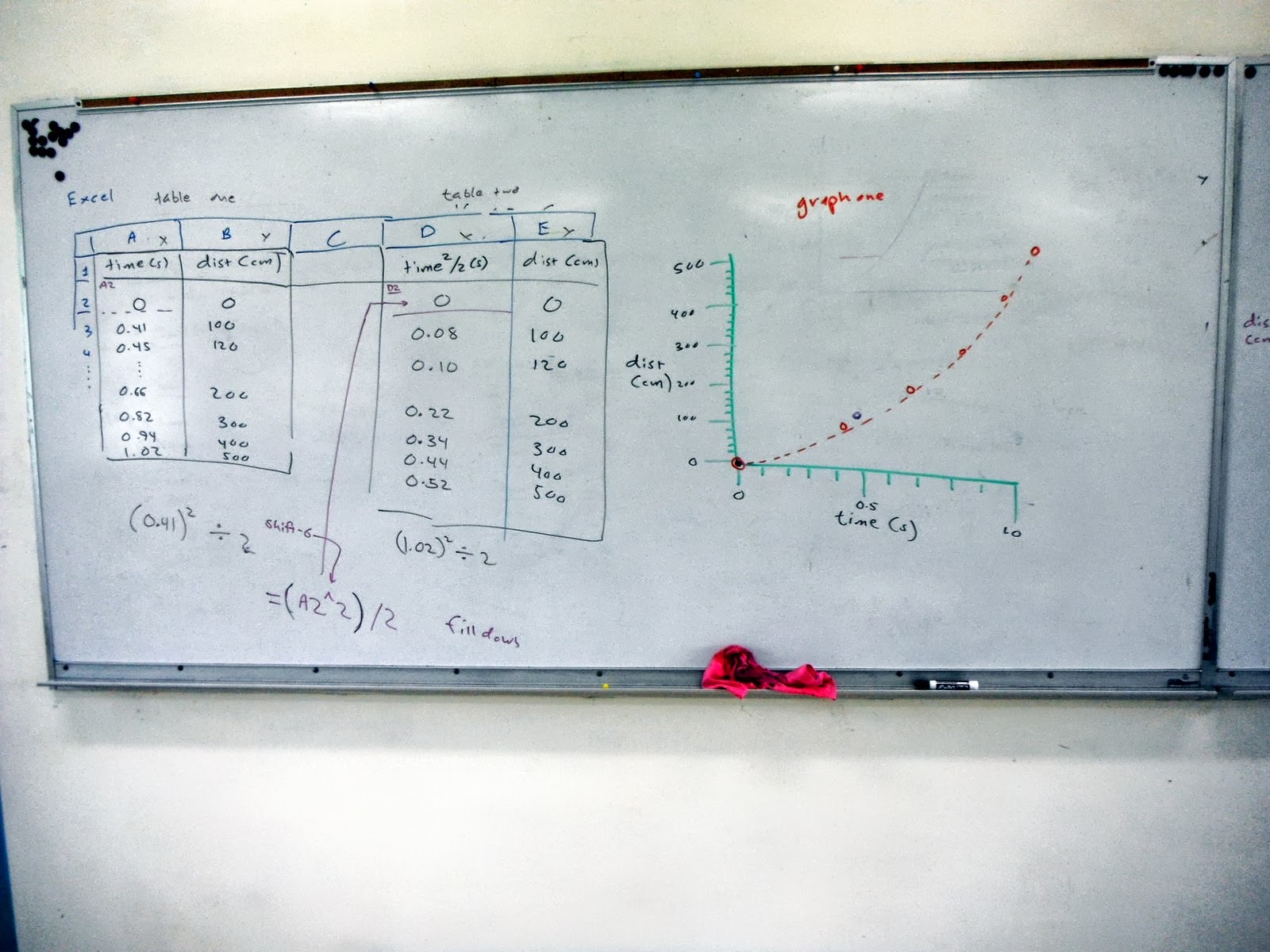
I then put up tables provided by Jane Rose, plotting both graphs as a demonstration of what the lab report required.

Although more confusing, the RipStik acceleration and deceleration went well. I think it might be fun to run the deceleration first, spin around and then accelerate down the sidewalk, creating a single continuous line. Might need someone to mark the zero, or maybe just reverse the whole thing, running a 1600 marked track from East to West. That way the deceleration heads up in distance, and then the acceleration falls back down. Might even get a pseudo-parabola with a bit of flatness at the turn-around.



Comments
Post a Comment